
|
|
「自由度」という考え方(人の腕の自由度) |
|
|
|
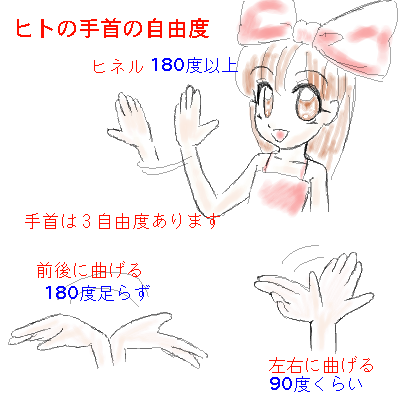
人の手首の自由度 |
|
|
||
|
私達人類の手は器用です。 この器用さはナニで決まるか? その一つは、工学的に言えば 関節の「自由度」と「関節角」ですね。 自由度とは、厳密に言うと難しいのですが、簡単に言うと、 「曲る方向の数」です。 手首:3自由度:それぞれ90度以上曲る。 ヒジ:1自由度:160度くらい曲る。 肩:3自由度:それぞれ90度以上曲る。 腕全体で言えば7自由度あります。 6自由度あれば3次元空間における手の位置と姿勢を自由に制御できます。 手は、腕のとどく範囲内であれば、ほぼ自由な角度に向ける事ができます。 肩に3自由度あるので、手の位置は腕の届く範囲内ならどこにでも置けますし、 手首にも3自由度あるので、どの位置でもある程度、自由に向きを変えられます。 さらに人は7自由度もあるので「冗長自由度」と言われます。 冗長自由度のおかげで、手や肩を動かさずにヒジの高さを調節できるワケですね。 腕の届く範囲内なら、障害物を避けて手を置く事が可能になるのです。 これが「器用」と言っても良いトコロです。 |
||
|
|
|
|
|
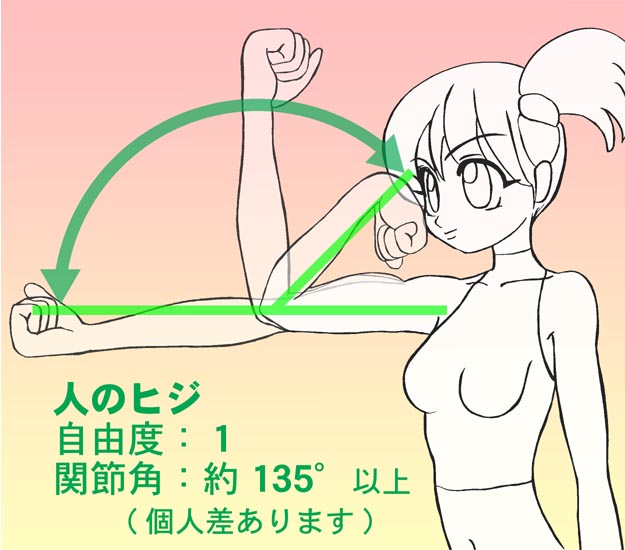
人のヒジの自由度 |
|
|
||
|
ヒジは1方向にしか曲りませんね。 1自由度です。 関節角は135度くらいは在りますね。 もっとも、関節角は個人差もあります。 |
||
|
|
|
|
|
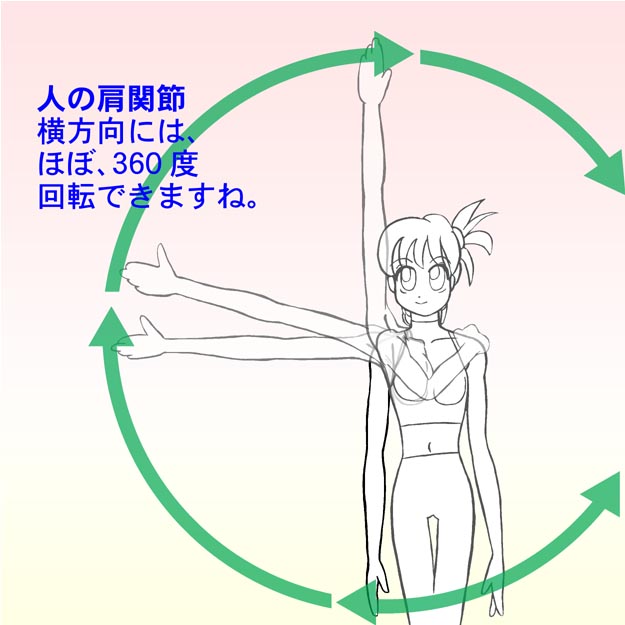
人の肩の自由度:左右の旋回 |
|
|
||
|
|
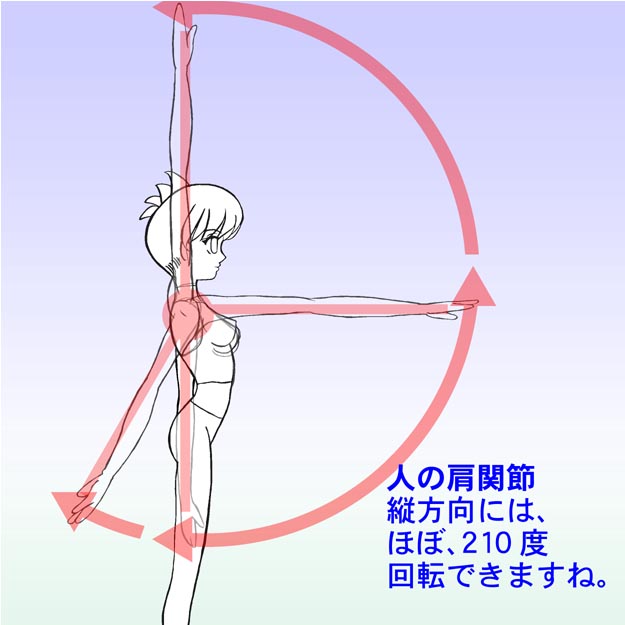
人の肩の自由度:前後の旋回 |
|
|
||
|
人の肩は「3自由度」あります。 前から観たら、横方向には360度、グルグルと旋回可能です。 横から観たら、前後方向にも210度は曲ります。 ヒネル方向にも180度は曲ります。 しかし、このヒネリの動きは複雑でして、、、 |
||
|
|
|
|
|
人の肩の自由度:肩の可動 |
|
|
||
|
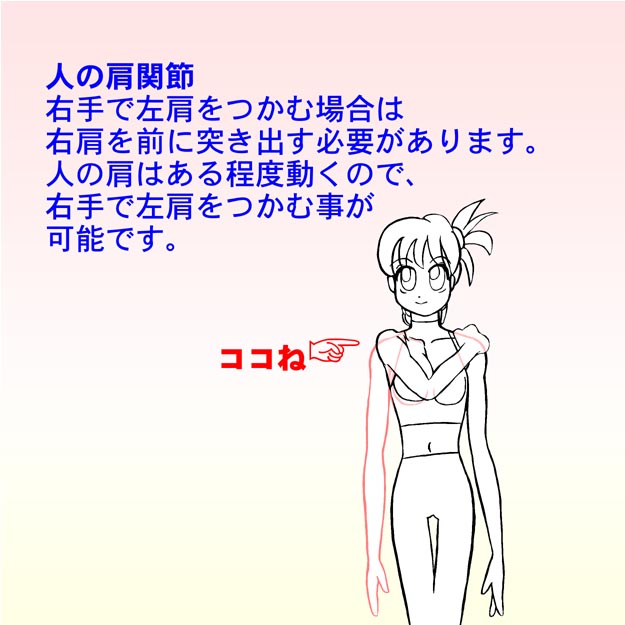
人は、肩そのものがグルグルと旋回するので複雑ですね。 この複雑な動きのオカゲで、人類の手は器用なのです。 右手で左の肩をつかむ場合、 右肩を少し前につきだします。 肩も上下前後に動かせるので、右手も左側に廻せるワケですね。 |
||
|
|
|
|
|
人の肩の自由度:腕を上にあげる |
|
|
||
|
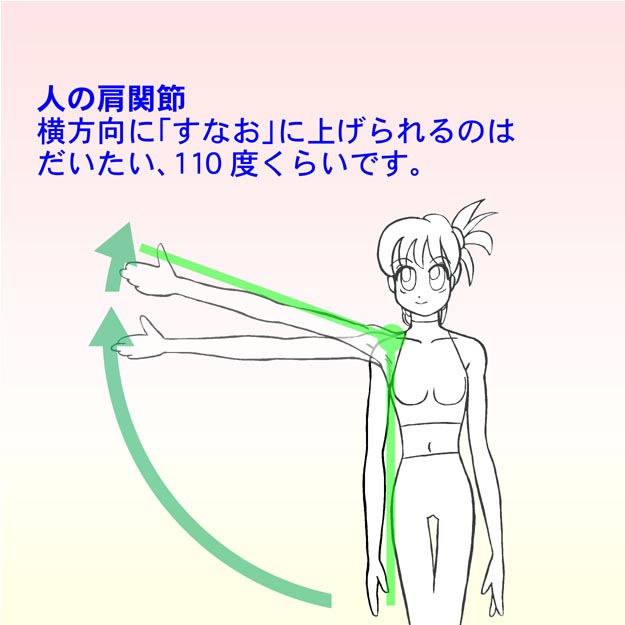
腕を横方向に広げて上にあげる場合、 すなおに上がるのは、せいぜい110度くらいですね。 |
||
|
|
人の肩の自由度:腕を真上にあげる |
|
|
||
|
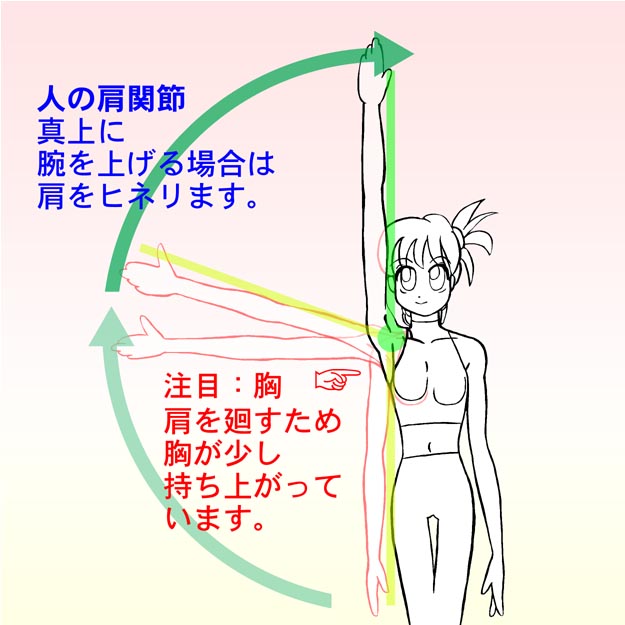
腕を真上に持ち上げるには、 肩も捻り上げる必要があります。 右腕を真上に振り上げてみましょう。 胸も上に持ち上がるでしょ? 肩もヒネリ上げられているので、胸も上に持ち上げられてしまいます。 |
||
|
|
|
|
|
人の肩の自由度:腕をひねる。腕が下の場合 |
|
|
||
|
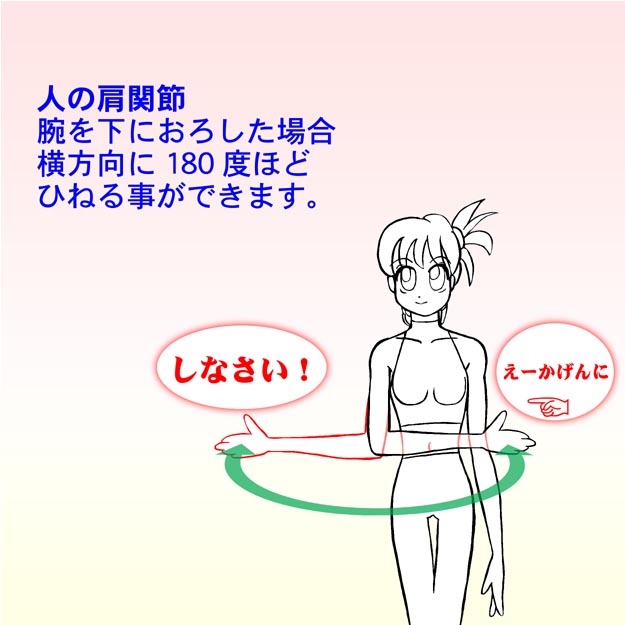
腕を下におろしている場合、 腕は180度、ひねる事ができますね。 漫才のツッコミ動作も可能です。 |
||
|
|
人の肩の自由度:腕をひねる。腕が横の場合 |
|
|
||
|
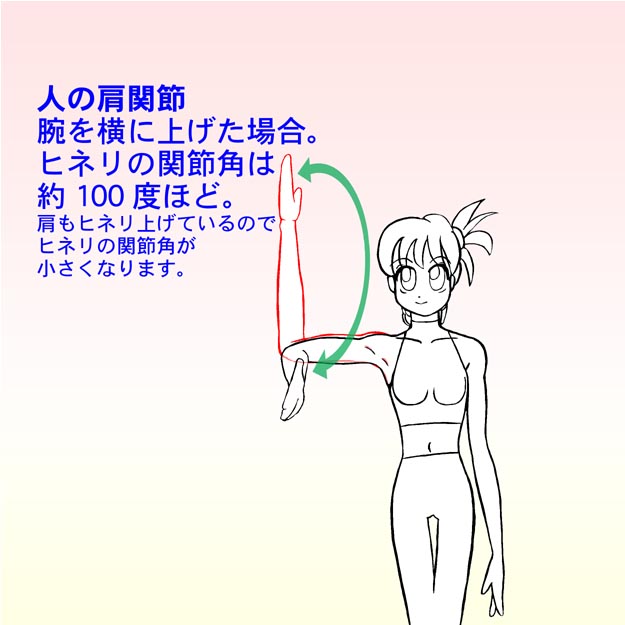
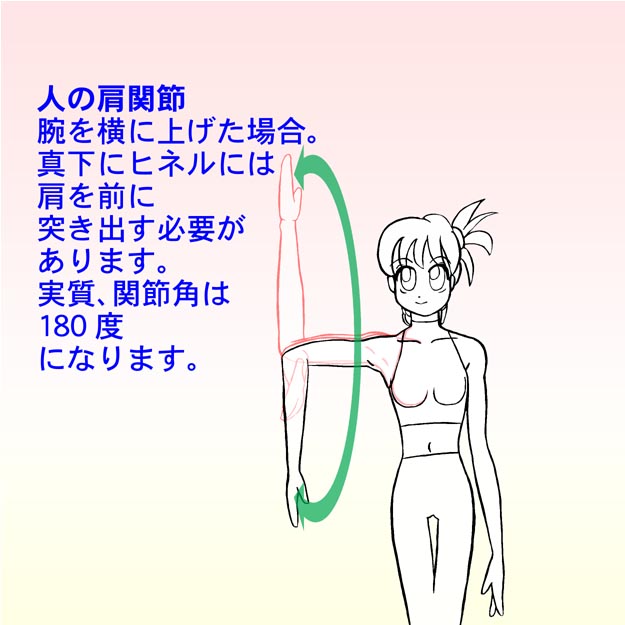
||
|
腕を横にあげている場合、 腕のヒネリの関節角は、100度ほどです。 ただし、肩も前に突き出すと、 180度ひねる事ができますね。 肩が柔軟なので、横に突き出した時も ヒネリの関節角は実質、 180度です。 |
||
|
|
|
|
|
人の肩の自由度:腕をひねる。腕が横の場合 |
|
|
||
|
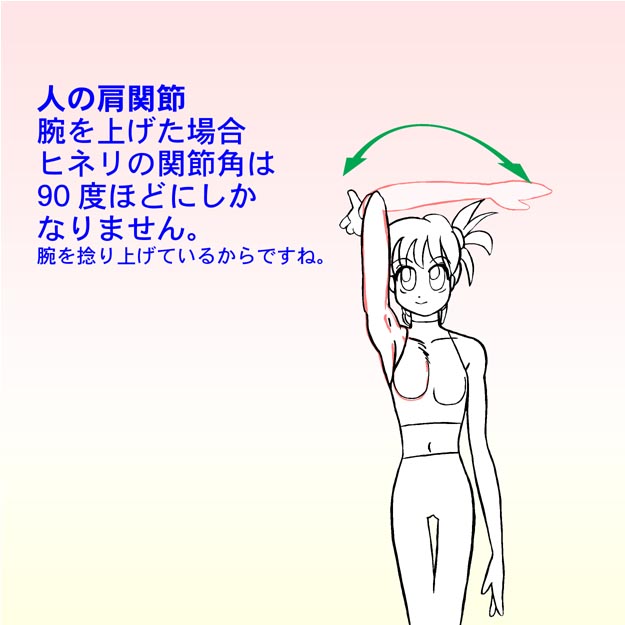
腕を真上に上げた場合。 真上には肩をヒネリ上げているので、 腕のヒネル関節角は小さくなります。 せいぜい、90度くらいしかヒネル事ができません。 人間や生物の腕や脚は、モーターで動くロボットとは異なり、 筋肉で引っ張って動くので、複雑な制約条件がありますね。 |
||
|
|
|